

Ce projet intitulé Robot a constitué le fil rouge de ma formation sur Blender, à travers ce projet j’ai pu découvrir tout les outils et différentes pratiques de la modélisation 3D, c’est un projet très complet et qui m’as beaucoup appris.
Mes objectifs à travers ce projet étaient de :
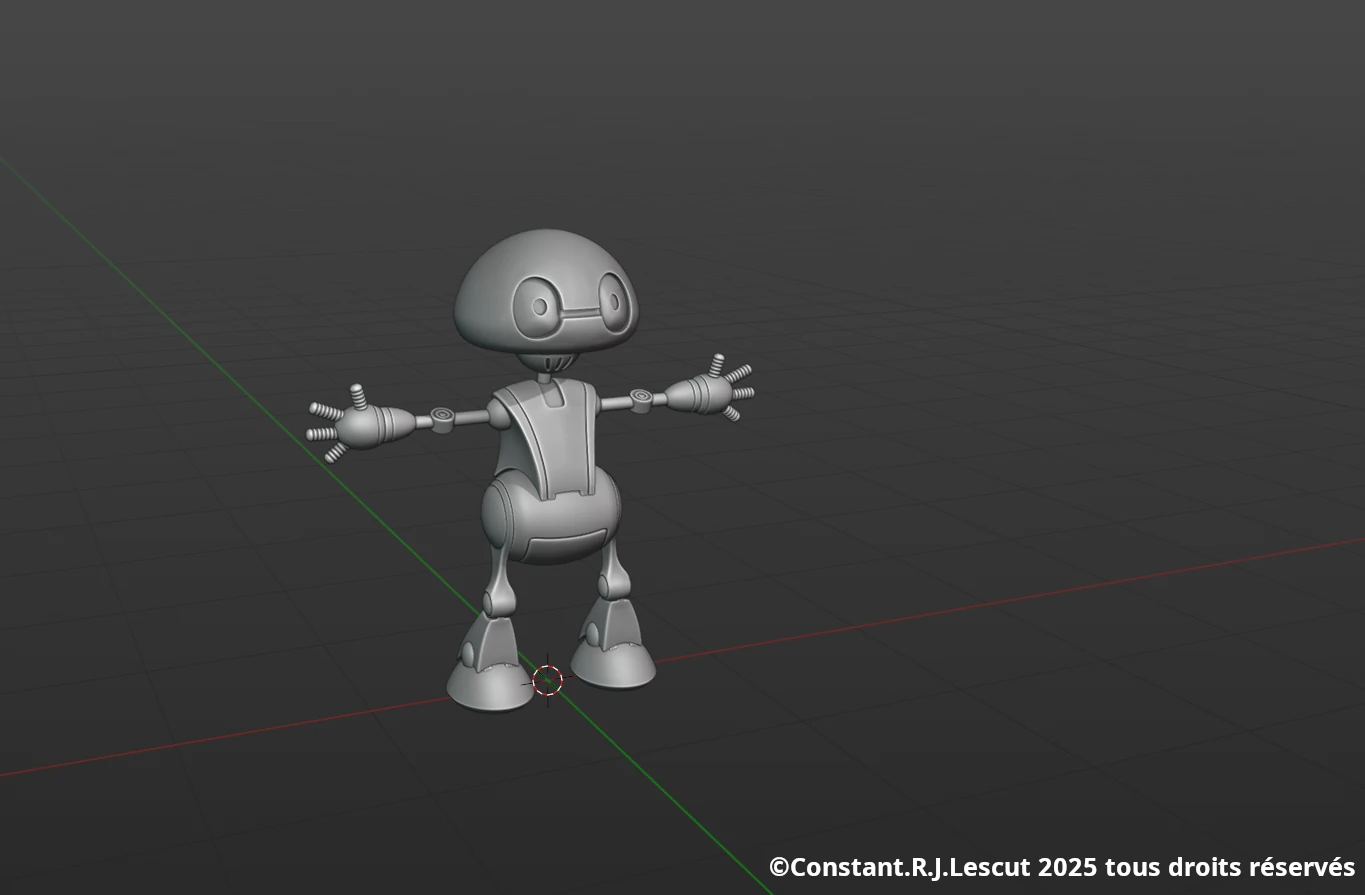
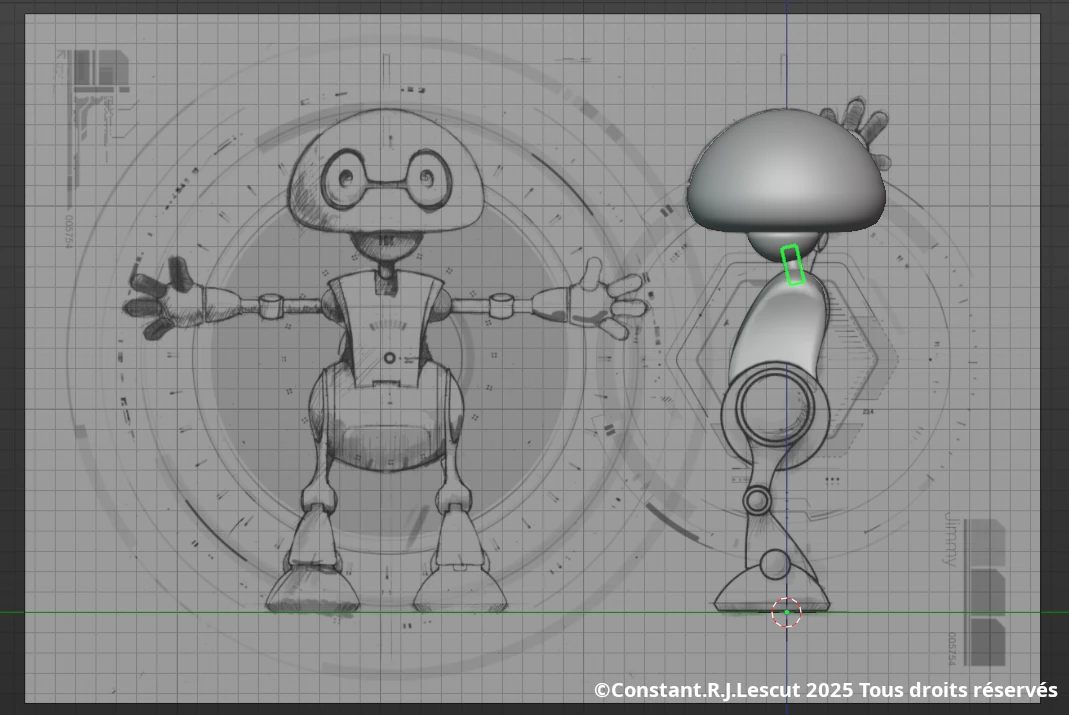
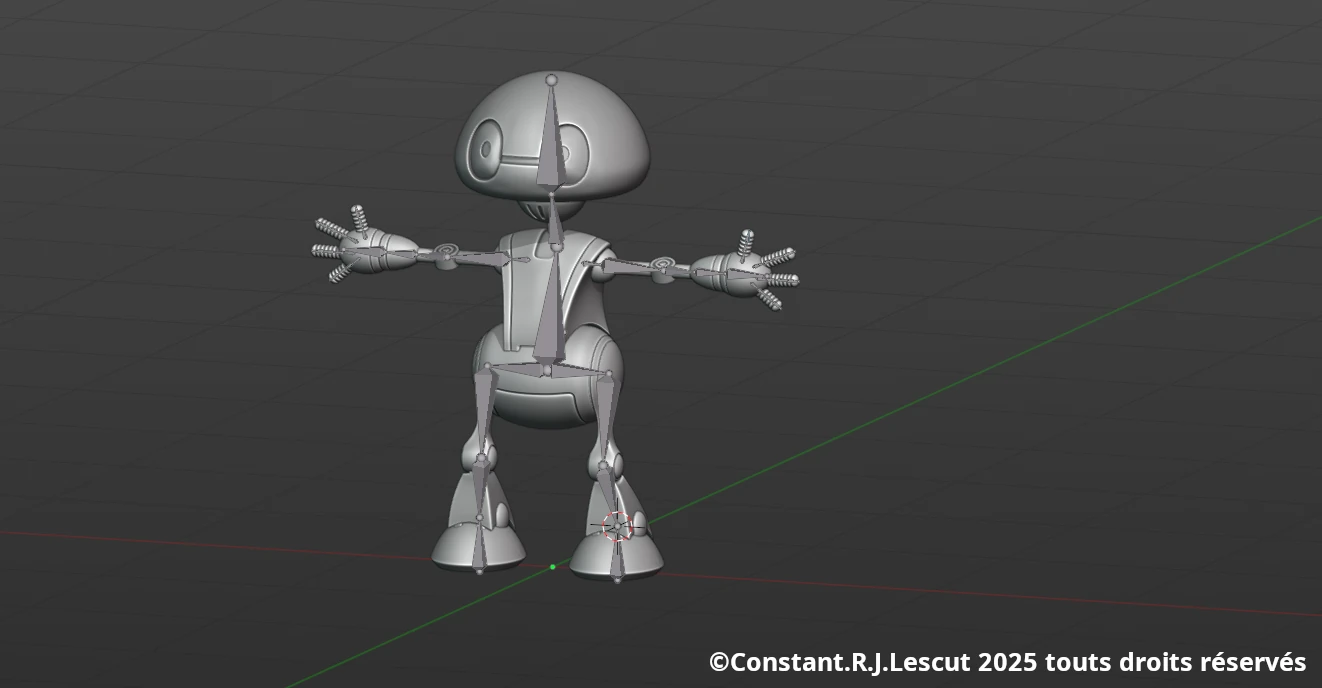
J’ai tout d’abord démarré par la mise en place d'une image de référence de profil et de face d’un petit robot. Ensuite, j’ai modélisé toutes les parties du robot individuellement et les ai assemblées, soit à partir de formes simples, soit grâce à des extrusions de points (Add-on “single vert”) et création de faces.
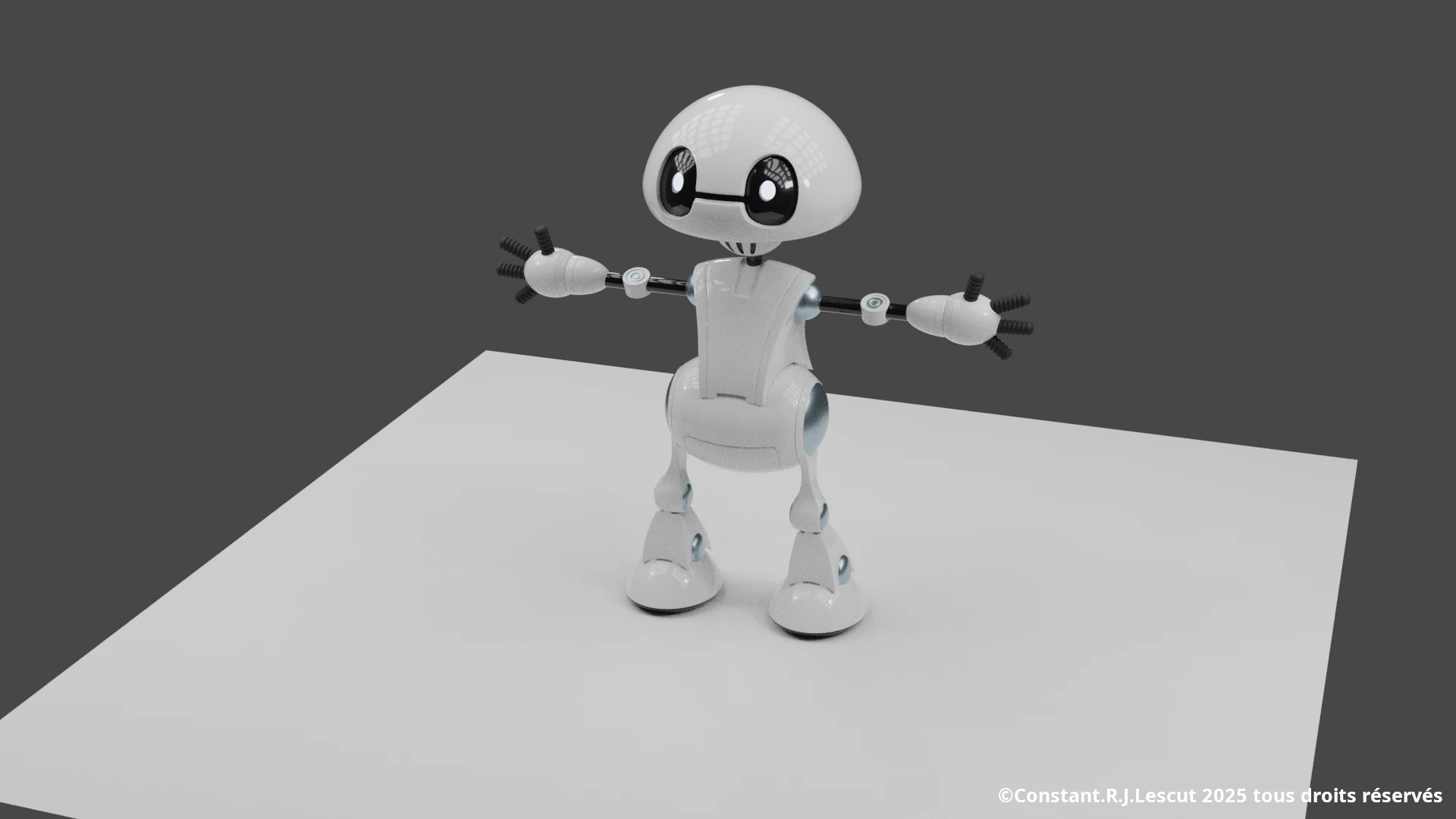
J’ai ensuite enchaîné sur le shading du robot grâce au système de nœuds de Blender. J’ai donc généré plusieurs shaders plastiques (noir et blanc) pour le corps et le contour des yeux, un métallique pour les hanches et articulations, un caoutchouc noir pour les bras et doigts, puis un shaders blanc/bleu d’émission pour les yeux.
J’ai également configuré le moteur de rendu Cycles et des environnements HDRI (Add-on “Easy-HDRI”) pour une image plus réaliste et qualitative.
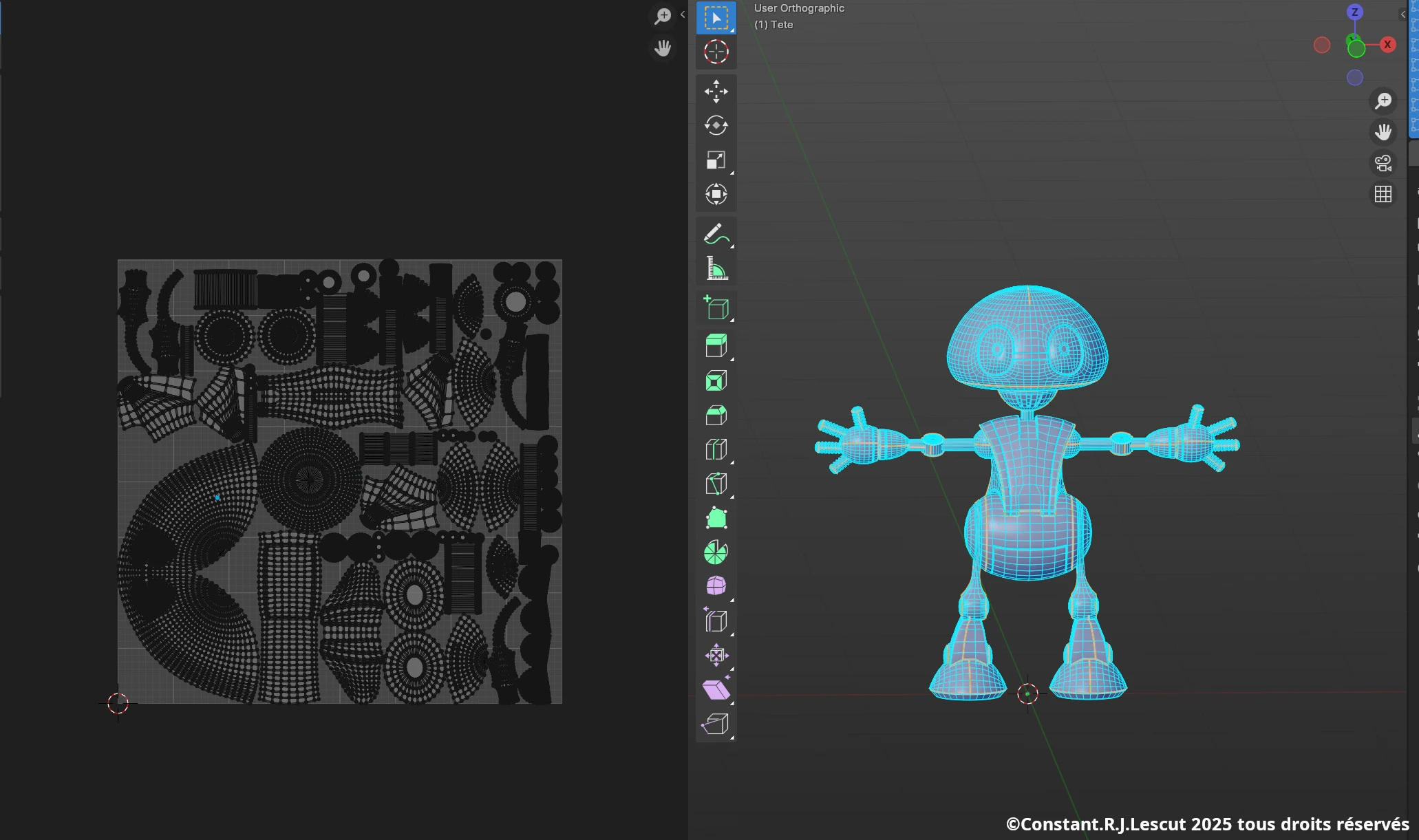
Je suis ensuite passé au dépliage d’UV. J’ai donc utilisé le marquage d’arrêtes et le dépliage automatique de Blender. Pour les pièces complexes j’ai utiliser la fonction “Smart UV Project” de Blender.
Afin de permettre l’animation de notre robot je suis passé au rigging de celui-ci. J’ai donc utiliser le système d’armature de Blender. J’ai donc positionné parfaitement les os de mon robot par rapport aux articulations.
Pour lier les parties de mon robot à ses os, j’ai utilisé un parentage simple pour les pièces à mouvement mécanique et une parentage proportionnel avec une “Weight Map” pour celles à articulations type caoutchouc.
Une fois le rigging terminé, je me suis lancé dans l’animation d’un cycle de marche pour mon robot. J’ai simplement reproduit un cycle de marche à l’aide d’une image de référence et par insertion de clefs.
J’ai ensuite adoucis l’animation en changeant les différents types d’interpolations.
Enfin pour le faire se déplacer physiquement je lui ai fait suivre une courbe de Bézier et j’ai synchronisé au mieux son cycle de marche avec sa vitesse d’avancement pour un rendu plus réaliste (disponible en bas de page).
Finalement, j’ai fait un peu de composition, j’ai donc utiliser le système de compositing par nœud de Blender.
J’ai incrusté le robot dans un décor réaliste, j’ai fait un peu de colorimétrie puis j’y ai inséré un logo. J’ai finis par faire un rendu.